Nathan Thomas White
I currently work at Intrinsic as a Research Software Engineer.
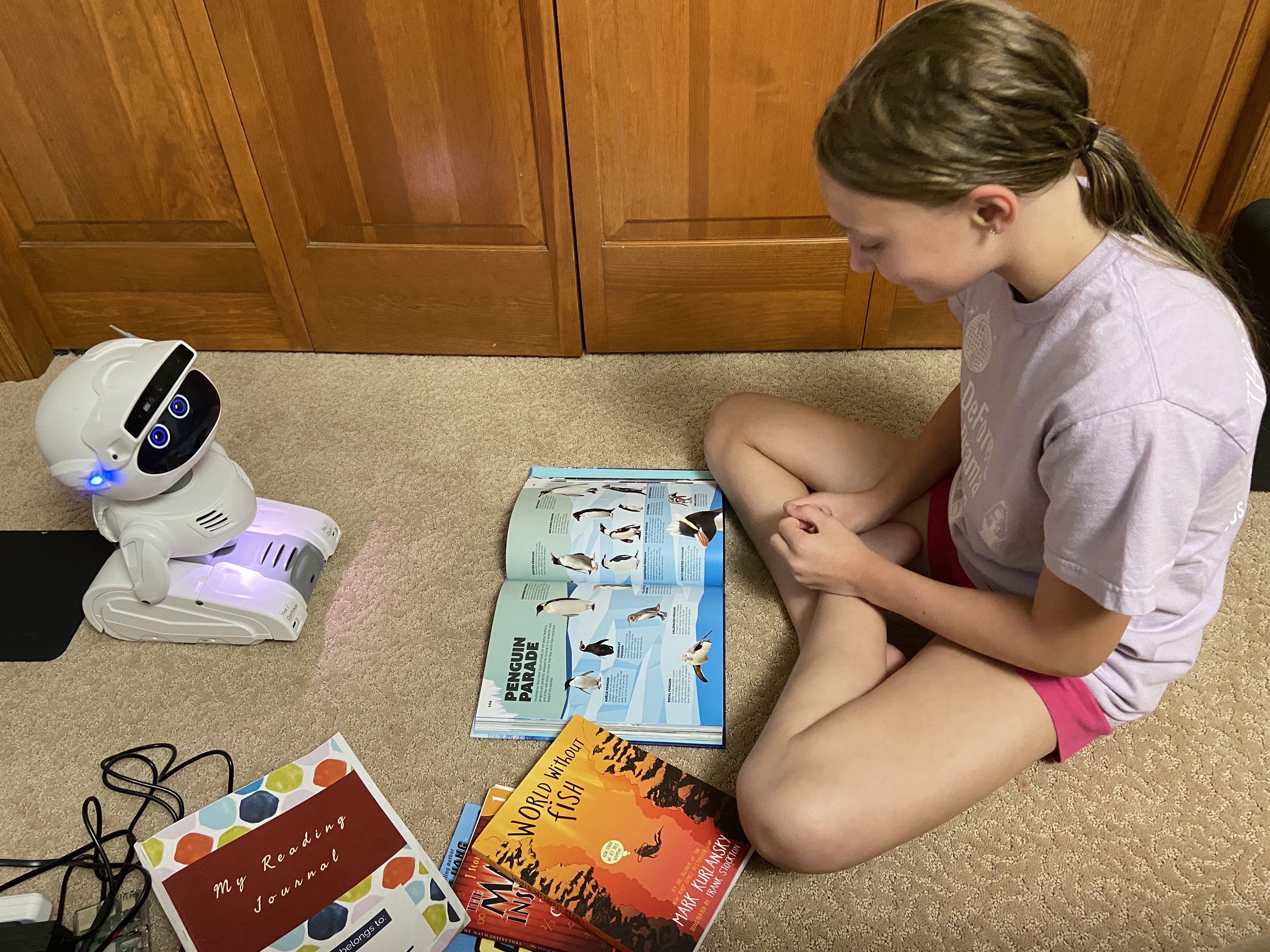
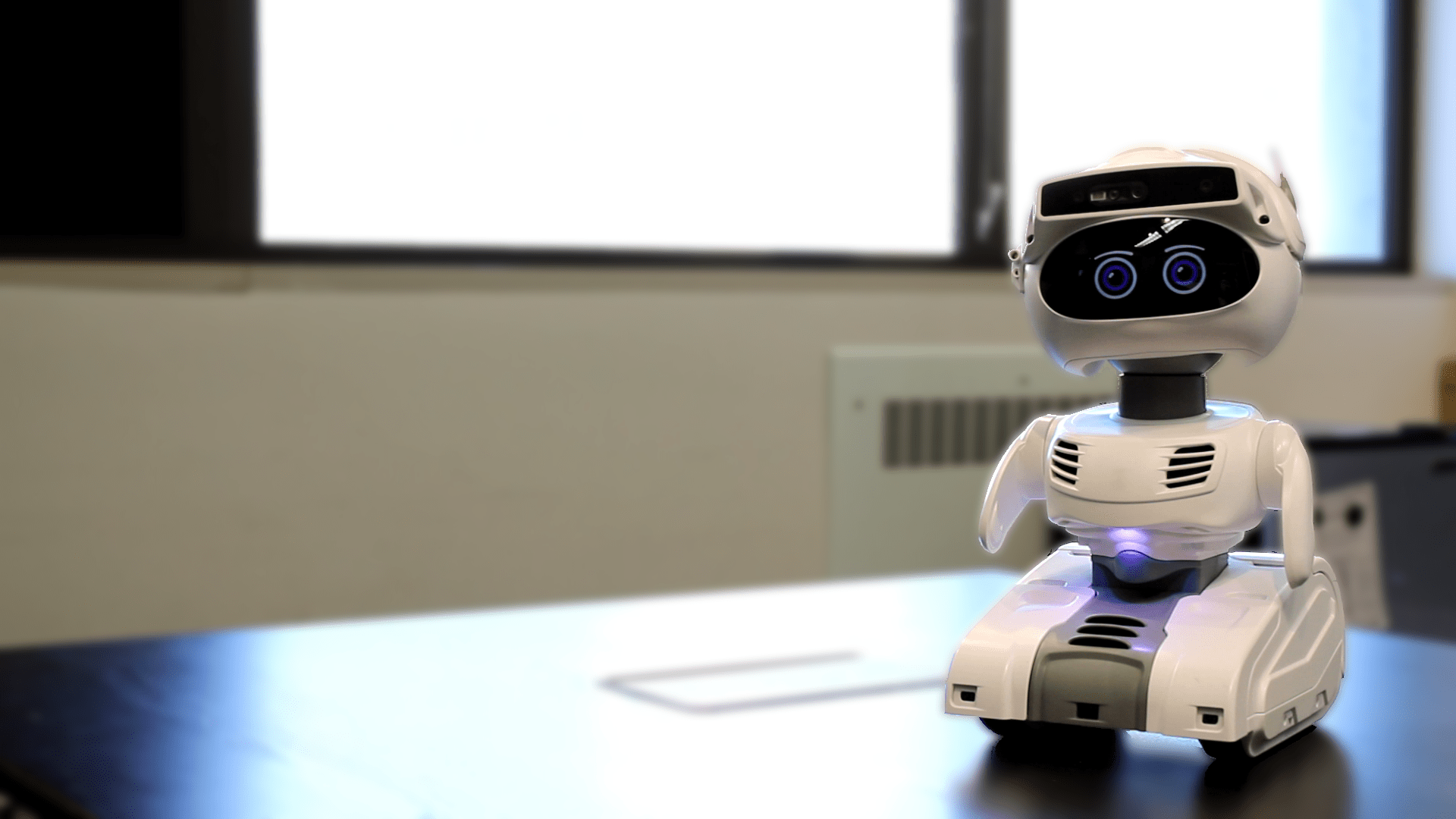
I completed my PhD at the University of Wisconsin - Madison, studying Human-Robot Interaction as part of the People and Robots Lab under the advisement of Dr. Bilge Mutlu. I completed my MS degree in Computer Science at the University of Wisconsin-Madison, and my BS degree in Computer Science at the University of Minnesota-Twin Cities.

Technology is human-centered, and thus needs to be usable by people. I am passionate about designing systems and technologies that are usable and intuitive for a wide range of potential users. My work reflects this commitment, as I have built systems and designed interactions that aim to bridge the gap between technical complexity and user understanding. While my work has focused on human-robot interaction, I have incorporated elements from human-computer interaction, design, and human behavior literature to create interfaces and interactions that simplify complex tasks, enabling users to engage with advanced technologies more effectively. By building systems that bridge the gap between technical complexity and user understanding, I aim to make advanced technologies seamlessly integrate into people's daily lives across various domains.